PG(中国大陆)电子科技股份有限公司-官方网站


在具身智能赛道,不同的企业选择了不同的技术路线。宇树以运动控制见长,而卧安机器人选择了一条差异化路径——“一脑多形,多机协同”。
这一技术哲学的底PG电子官网层逻辑,源于对家庭场景的*性原理推导。
所谓“一脑多形”,是构建一个通用的家庭机器人大脑,训练一次,即可在保姆机器人、运动机器人、陪伴机器人等不同形态间共享复用。
“我们并不是反对通用智能,而是反对用单一本体去勉强覆盖所有场景。”卧安联合创始人兼CEO李志晨阐释道。在他看来,*优的架构应当是一个统一的大脑在不同本体之间进行能力复用、决策协同和数据共享,而执行层面由不同形态机器人各司其职。
为什么不能用一个机器人包打天下?李志晨从两个维度给出了解释。
从人机关系看,如果有一个超级通用机器人,既是管家又是保姆又是保安又是助理,人们可能会担心它取代人。“但如果每个机器人只负责一个具体的职责,人永远是未来家庭的主人。机器人需要清晰的角色边界,有所为,也有所不为。”
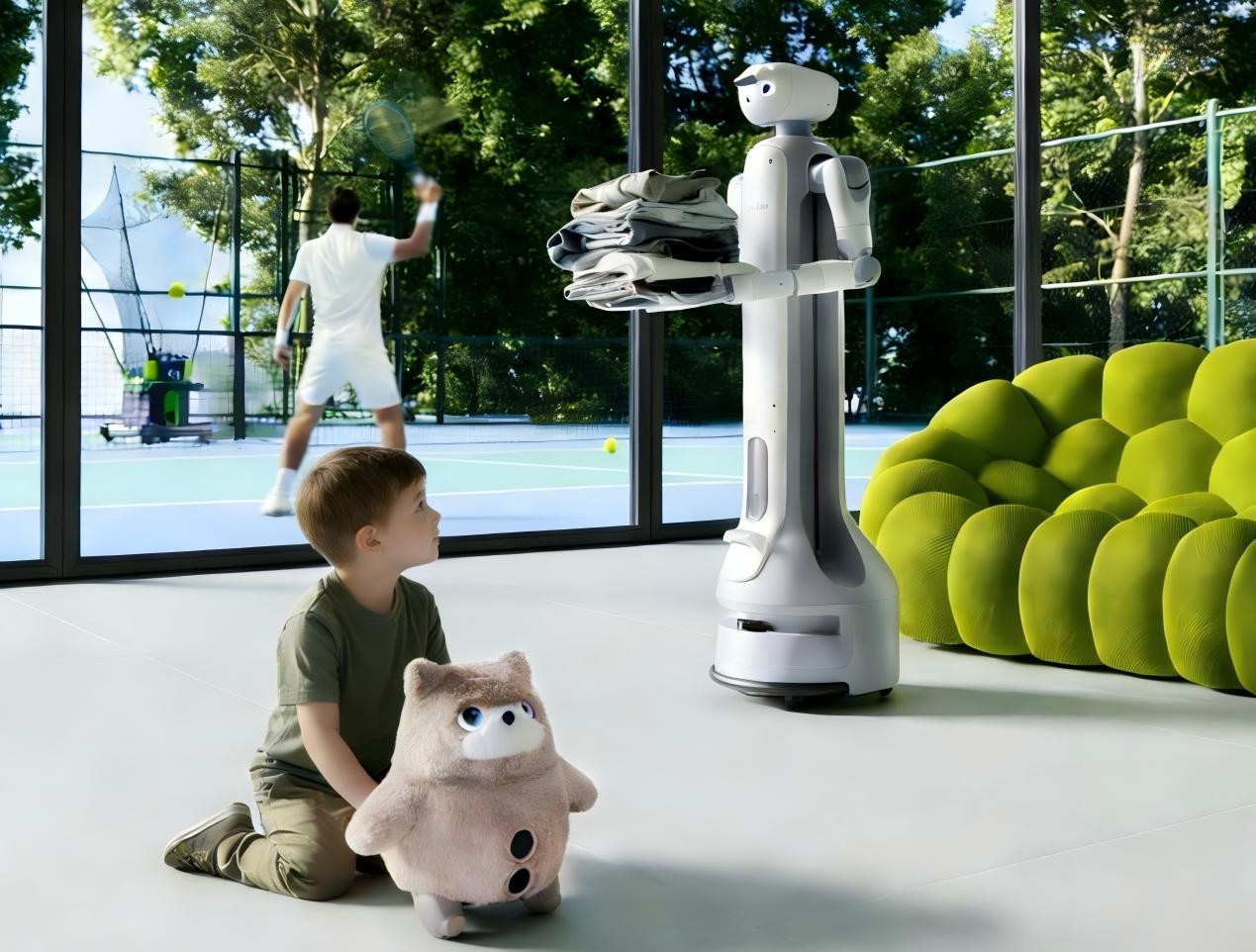
从效能角度,专用机器人也是*优解。从*性原理推导,不同需求天然对应不同*优形态——家务需要灵巧双手,运动需要动态反应,情感陪伴需要拟人化交互。因此,卧安的产品矩阵清晰分工:保姆机器人onero默默承担家务劳动,运动机器人Acemate主打网球陪练,陪伴机器人KataFriends提供情绪价值和家庭管家功能,精准匹配每一类家庭刚需。
真正“只干活”的家庭保姆机器人,难点恰恰在“不炫技”。它要能够在高度动态、杂乱、非结构化的家庭环境中,持续、稳定地完成大量重复但又细碎的任务。
“在受控环境里做高难度表演,和在真实家庭中长期稳定干活,难度不在一个量级。”李志晨指出。场景的复杂度、时间维度的要求、容错与信任的挑战,都决定了家庭具身智能的工程难度远超实验室演示。
卧安构建技术壁垒主要靠三层能力:一是团队基因,研发人员占比超50%,掌握AI机器视觉控制、机器人定位与环境构建、分布式神经控制网络三大核心技术。其中,自研VLA大模型实现从视觉感知到动作执行的端到端闭环控制,分布式神经控制网络以仿生通讯协议实现多关节协调,控制成功率超过99.4%。二是PMF和产品定义能力,擅长寻找“从0到1”的全球首创产品机会;三是家庭数据飞轮,通过真实用户和真实场景的持续反馈,让产品迭代形成“越做越清晰、越迭代越快”的正向循环。
目前,卧安的产品矩阵已经清晰成型。保姆机器人onero专注家务,以VLA模型为核心,能够在复杂家庭环境中自主完成衣物整理、餐后清洗收纳等高频任务。运动机器人Acemate锤炼“反应速度”,在高PG电子官网度动态的网球场景中实现自主追踪、预判和击球。陪伴机器人Kata打磨“共情能力”,通过多模态感知系统实现拟人化情感交互。

三条产品线不是独立的业务单元,而是通用大脑进化路径上的协同支点。运动机器人锤炼大脑的“反应速度”,陪伴机器人打磨大脑的“共情能力”,保姆机器人则承载“综合智慧”——理解环境、规划任务、灵巧操作、持续学习。
这一技术路线的商业化成效已经得到验证:2025年卧安实现营收9.01亿元,同比增长47.7%,毛利率54.0%,是具身智能赛道极少数实现盈利的企业之一,产品已进入全球超360万个家庭。
“未来家庭机器人不是一台机器,而是一个生态。”李志晨说。通过AIHub、大模型和统一的家庭决策层,卧安正把运动机器人、陪伴机器人、保姆机器人,以及未来更多形态的具身终端连接起来,形成一个可以持续自我进化、不断扩展边界的家庭具身生态。
这或许正是卧安对行业*大的启示:在具身智能的赛道上,真正的竞争不是谁的机器人动作更炫酷,而是谁能在真实家庭场景中,用*合理的技术路径,持续创造可被感知的价值。
